
picoでI2C bus scan
Page content
目的
I2C接続のOLEDディスプレイに表示をさせたい
そのためにまずは配線と認識できていることまでを実施する。
使用するOLEDは秋月電子の下記を利用する。
使用OLED : 0.96インチ 128×64ドット有機ELディスプレイ
参考 : ウィキペディア(I2C)
配線
I2CはGND/VCC/SCL/SDAの4本の配線を行えばよい。
今回はpicoの赤で囲った部分をOLEDと配線する。
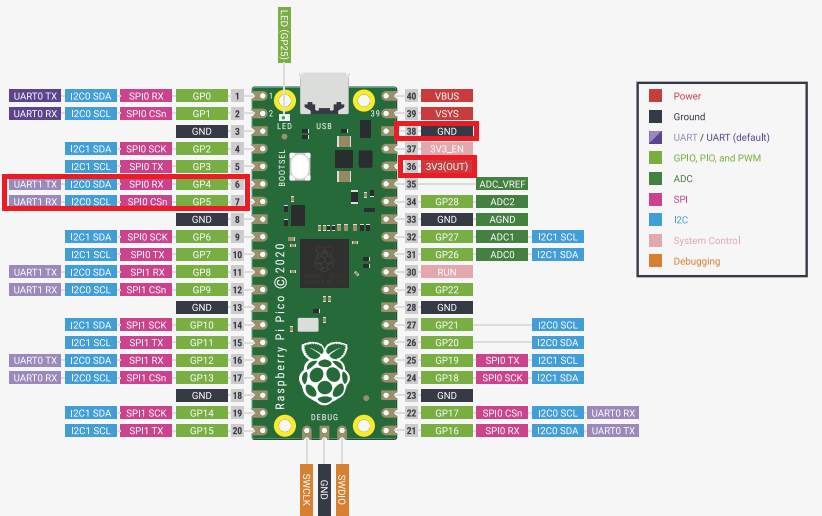
| pin番号 | 役割 |
|---|---|
| 6 | SDA |
| 7 | SCL |
| 36 | VCC(3.3V) |
| 38 | GNC |
サンプル調査
公式サンプルではI2Cのバススキャンサンプルは以下にある
pico-examples\i2c\bus_scan
このコードを見るとpicoでI2Cを使用するポイントは以下のようだ
- target_link_libraries
「hardware_i2c」を追加する - hファイル追加
#include “hardware/i2c.h”
#include “pico/binary_info.h”
I2Cの設定としては以下が必要なもよう
| API | 概要 |
|---|---|
| uint i2c_init (i2c_inst_t* i2c,uint baudrate) | I2Cの初期化、標準100kbit/s |
| void gpio_set_function ( uint gpio, enum gpio_function fn ) | pinの役割を設定する、今回はI2C用に設定 |
| static void gpio_pull_up ( uint gpio) | I2CのSDAとSCLをプルアップする |
| bi_decl | ? |
コード例
サンプルを参考に、すでに作成したex_02を拡張する。
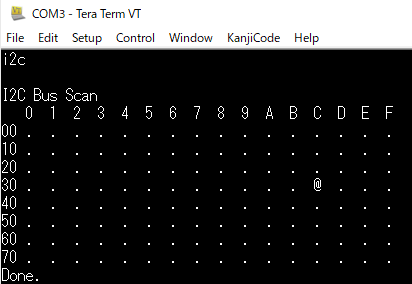
USBから「i2c」と入力することでサンプルのscanが実行されるようにする。
実行例
CMakeLists.txt
if (TARGET tinyusb_device)
add_executable(ex_03
ex_03.cpp
)
# Pull in our pico_stdlib which aggregates commonly used features
target_link_libraries(ex_03 pico_stdlib hardware_i2c)
# enable usb output, disable uart output
pico_enable_stdio_usb(ex_03 1)
pico_enable_stdio_uart(ex_03 0)
# create map/bin/hex/uf2 file etc.
pico_add_extra_outputs(ex_03)
# add url via pico_set_program_url
example_auto_set_url(ex_03)
elseif(PICO_ON_DEVICE)
message(WARNING "not building ex_03 because TinyUSB submodule is not initialized in the SDK")
endif()
ex_03.cpp
/**
* the reserved_addr(uint8_t addr) function is:
* the i2c_bus_scan() function is:
* Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
* SPDX-License-Identifier: BSD-3-Clause
*/
#include <stdio.h>
#include "pico/stdlib.h"
#include "hardware/i2c.h"
#include "pico/binary_info.h"
#include "class/cdc/cdc_device.h"
// I2C reserves some addresses for special purposes. We exclude these from the scan.
// These are any addresses of the form 000 0xxx or 111 1xxx
bool reserved_addr(uint8_t addr) {
return (addr & 0x78) == 0 || (addr & 0x78) == 0x78;
}
int i2c_bus_scan(){
printf("\nI2C Bus Scan\n");
printf(" 0 1 2 3 4 5 6 7 8 9 A B C D E F\n");
for (int addr = 0; addr < (1 << 7); ++addr) {
if (addr % 16 == 0) {
printf("%02x ", addr);
}
// Perform a 1-byte dummy read from the probe address. If a slave
// acknowledges this address, the function returns the number of bytes
// transferred. If the address byte is ignored, the function returns
// -1.
// Skip over any reserved addresses.
int ret;
uint8_t rxdata;
if (reserved_addr(addr))
ret = PICO_ERROR_GENERIC;
else
ret = i2c_read_blocking(i2c_default, addr, &rxdata, 1, false);
printf(ret < 0 ? "." : "@");
printf(addr % 16 == 15 ? "\n" : " ");
}
printf("Done.\n");
return 0;
}
int main() {
stdio_init_all();
unsigned short cmd_buff_index_ = 0;
char cmd_buff[256] = {0};
char tmp_input;
int res = 0;
// i2c setting
// This example will use I2C0 on the default SDA and SCL pins (4, 5 on a Pico)
i2c_init(i2c_default, 100 * 1000);
gpio_set_function(PICO_DEFAULT_I2C_SDA_PIN, GPIO_FUNC_I2C);
gpio_set_function(PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C);
gpio_pull_up(PICO_DEFAULT_I2C_SDA_PIN);
gpio_pull_up(PICO_DEFAULT_I2C_SCL_PIN);
// Make the I2C pins available to picotool
bi_decl(bi_2pins_with_func(PICO_DEFAULT_I2C_SDA_PIN, PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C));
// led setting
const uint LED_PIN = PICO_DEFAULT_LED_PIN;
gpio_init(LED_PIN);
gpio_set_dir(LED_PIN, GPIO_OUT);
while (true) {
// RxBuffにデータが存在する
if(tud_cdc_available() > 0){
// 1文字受信
tmp_input = tud_cdc_read_char();
// 改行文字か?
if(tmp_input == '\r') {
// 表示改行
printf("\n");
// null文字付与
cmd_buff[cmd_buff_index_] = '\0';
// コマンド判断
char* command = &cmd_buff[0];
if(strcmp(command, "led") == 0) {
printf("LED Blink\n");
gpio_put(LED_PIN, 1);
sleep_ms(250);
gpio_put(LED_PIN, 0);
sleep_ms(250);
} else if(strcmp(command, "i2c") == 0) {
if(i2c_bus_scan() != 0) printf("is2 bus scan err\n");
} else {
printf("no such command\n");
}
// index clear
cmd_buff_index_ = 0;
} else {
cmd_buff[cmd_buff_index_] = tmp_input;
cmd_buff_index_++;
}
}
// wait
sleep_ms(1);
}
}